Промышленная сеть реального времени CAN представляет собой сеть с общей средой передачи данных. Это означает, что все узлы сети одновременно принимают сигналы передаваемые по шине. Невозможно послать сообщение какому-либо конкретному узлу. Все узлы сети принимают весь трафик передаваемый по шине. Однако, CAN-контроллеры предоставляют аппаратную возможность фильтрации CAN-сообщений.
Каждый узел состоит из двух составляющих. Это собственно CAN контроллер, который обеспечивает взаимодействие с сетью и реализует протокол, и микропроцессор (CPU).
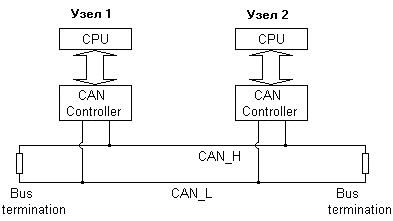 Рис. 1. Топология сети CAN.
Рис. 1. Топология сети CAN.
CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии — CAN_H (can-high) и CAN_L (can-low), по которым передаются сигналы. Логический ноль регистрируется, когда на линии CAN_H сигнал выше, чем на линии CAN_L. Логическая единица — в случае когда сигналы CAN_H и CAN_L одинаковы (отличаются менее чем на 0.5 В). Использование такой дифференциальной схемы передачи делает возможным работу CAN сети в очень сложных внешних условиях. Логический ноль — называется доминантным битом, а логическая единица — рецессивным. Эти названия отражают приоритет логической единицы и нуля на шине CAN. При одновременной передаче в шину лог. нуля и единицы, на шине будет зарегестрирован только логический ноль (доминантный сигнал), а логическая единица будет подавлена (рецессивный сигнал).
Типы сообщений сети CAN.
Данные в CAN передаются короткими сообщениями-кадрами стандартного формата. В CAN существуют четыре типа сообщений:
- Data Frame
- Remote Frame
- Error Frame
- Overload Frame
Data Frame — это наиболее часто используемый тип сообщения. Он состоит из следующих основных частей:
- поле арбитража (arbitration field) определяет приоритет сообщения в случае, когда два или более узлов одновременно пытаются передать данные в сеть. Поле арбитража состоит в свою очередь из:
- для стандарта CAN-2.0A, 11-битного идентификатора + 1 бит RTR (retransmit)
- для стандарта CAN-2.0B, 29-битного идентификатора + 1 бит RTR (retransmit)
Следует отметить, что поле идентификатора, несмотря на свое название никак не идентифицирует само по себе ни узел в сети, ни содержимое поля данных. Для Data кадра бит RTR всегда выставлен в логический ноль (доминантный сигнал).
- поле данных (data field) содержит от 0 до 8 байт данных
- поле CRC (CRC field) содержит 15-битную контрольную сумму сообщения, которая используется для обнаружения ошибок
- слот подтверждения (Acknowledgement Slot) (1 бит), каждый CAN-контроллер, который правильно принял сообщение посылает бит подтверждения в сеть. Узел, который послал сообщение слушает этот бит, и в случае если подтверждение не пришло, повторяет передачу. В случае приема слота подтверждения передающий узел может быть уверен лишь в том, что хотя бы один из узлов в сети правльно принял его сообщение.
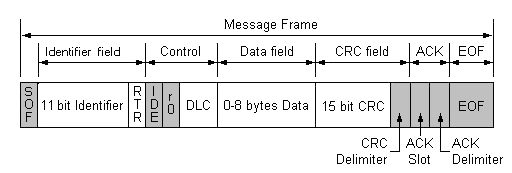 Рис. 2. Data frame стандарта CAN 2.0A.
Рис. 2. Data frame стандарта CAN 2.0A.
Remote Frame — это Data Frame без поля данных и с выставленным битом RTR (1 — рецессивные бит). Основное предназначение Remote кадра — это инициация одним из узлов сети передачи в сеть данных другим узлом. Такая схема позволяет уменьшить суммарный трафик сети. Однако, на практике Remote Frame сейчас используется редко (например, в DeviceNet Remote Frame вовсе не используется).
Error Frame — это сообщение которое явно нарушает формат солобщения CAN. Передача такого сообщения приводит к тому, что все узлы сети регистрируют ошибку формата CAN-кадра, и в свою очередь автоматически передают в сеть Error Frame. Результатом этого процесса является автоматическая повторная передача данных в сеть передающим узлом. Error Frame состоит из поля Error Flag, которое состоит из 6 бит одинакового значения (и таким образом Error frame нарушает проверку Bit Stuffing, см. ниже), и поля Error Delimiter, состоящее из 8 рецессивных битов. Error Delimiter дает возможность другим узлам сети обнаружив Error Frame послать в сеть свой Error Flag.
Overload Frame — повторяет структуру и логику работы Error кадра, с той разницей, что он используется перегруженным узлом, который в данный момент не может обработать поступающее сообщение, и поэтому просит при помощи Overload-кадра о повторной передаче данных. В настоящее время Overload-кадр практически не используется.
Контроль доступа к среде передачи (побитовый арбитраж).
Поле арбитража CAN-кадра используется в CAN для разрешения коллизий доступа к шине методом не деструктивного арбитража. Суть метода не деструктивного арбитража заключается в следующем. В случае, когда несколько контроллеров начинают одновременную передачу CAN кадра в сеть, каждый из них сравнивает, бит, который собирается передать на шину с битом, который пытается передать на шину конкурирующий контроллер. Если значения этих битов равны, оба контроллера передают следующий бит. И так происходит до тех пор, пока значения передаваемых битов не окажутся различными. Теперь контроллер, который передавал логический ноль (более приоритетный сигнал) будет продолжать передачу, а другой (другие) контроллер прервёт свою передачу до того времени, пока шина вновь не освободится. Конечно, если шина в данный момент занята, то контроллер не начнет передачу до момента её освобождения.
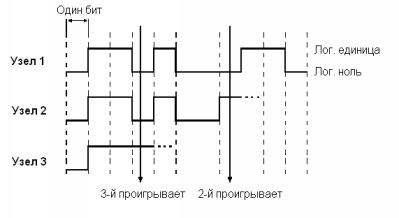 Рис. 3. Побитовый арбитраж на шине CAN.
Рис. 3. Побитовый арбитраж на шине CAN.
Методы обнаружения ошибок.
CAN протокол определяет пять способов обнаружения ошибок в сети:
- Bit monitoring
- Bit stuffing
- Frame check
- ACKnowledgement Check
- CRC Check
Bit monitoring — каждый узел во время передачи битов в сеть сравнивает значение передаваемого им бита со значением бита которое появляется на шине. Если эти значения не совпадают, то узел генерирует ошибку Bit Error. Естественно, что во время арбитража на шине (передача поля арбитража в шину) этот механизм проверки ошибок отключается.
Bit stuffing — когда узел передает последовательно в шину 5 бит с одинаковым значением, то он добавляет шестой бит с противоположным значением. Принимающие узлы этот дополнительный бит удаляют. Если узел обнаруживает на шине больше 5 последовательных бит с одинаковым значением, то он генерирует ошибку Stuff Error.
Frame Check — некоторые части CAN-сообщения имеют одинаковое значение во всех типах сообщений. Т.е. протокол CAN точно определяет какие уровни напряжения и когда должны появляться на шине. Если формат сообщений нарушается, то узлы генерируют ошибку Form Error.
ACKnowledgement Check — каждый узел получив правильное сообщение по сети посылает в сеть доминантный (0) бит. Если же этого не происходит, то передающий узел регистрирует ошибку Acknowledgement Error.
CRC Check — каждое сообщение CAN содержит CRC сумму, и каждый принимающий узел подсчитывает значение CRC для каждого полученного сообщения. Если подсчитанное значение CRC суммы, не совпадает со значением CRC в теле сообщения, принимающий узел генерирует ошибку CRC Error.
Механизм ограничения ошибок (Error confinement).
Каждый узел сети CAN, во время работы пытается обнаружить одну из пяти возможных ошибок. Если ошибка обнаружена, узел передает в сеть Error Frame, разрушая тем самым весь текущий трафик сети (передачу и прием текущего сообщения). Все остальные узлы обнаруживают Error Frame и принимают соответствующие действия (сбрасывают принятое сообщение). Кроме того, каждый узел ведет два счетчика ошибок: Transmit Error Counter (счетчик ошибок передачи) и Receive Error Counter (счетчик ошибок приема). Эти счетчики увеличиваются или уменьшаются в соответствие с несколькими правилами. Сами правила управления счетчиками ошибок достаточно сложны, но сводятся к простому принципу, ошибка передачи приводит к увеличению Transmit Error счетчика на 8, ошибка приема увеличивает счетчик Receive Error на 1, любая корректная передача/прием сообщения уменшают соответствующий счетчик на 1. Эти правила приводят к тому, что счетчик ошибок передачи передающего узла увеличивается быстрее, чем счетчик ошибок приема принимающих узлов. Это правило соответствует предположению о большой вероятности того, что источником ошибок является передающий узел.
Каждый узел CAN сети может находится в одном из трех состояний. Когда узел стартует он находится в состоянии Error Active. Когда, значение хотя бы одного из двух счетчиков ошибок превышает предел 127, узел переходит в состояние Error Passive. Когда значение хотя бы одного из двух счетчиков превышает предел 255, узел переходит в состояние Bus Off.
Узел находящийся в состоянии Error Active в случае обнаружения ошибки на шине передает в сеть Active Error Flags. Active Error Flags сотстоит из 6 доминантных бит, поэтому все узлы его регистрируют. Узел в состоянии Passive Error передает в сеть Passive Error Flags при обнаружении ошибки в сети. Passive Error Flags состоит из 6 рецессивных бит, поэтому остальные узлы сети его не замечают, и Passive Error Flags лишь приводит к увеличению Error счетчика узла. Узел в состоянии Bus Off ничего не передает в сеть (не только Error кадры, но вообще никакие другие).
Адресация и протоколы высокого уровня
В CAN не существует явной адресации сообщений и узлов. Протокол CAN нигде не указывает что поле арбитража (Identification field + RTR) должно использоваться как идентификатор сообщения или узла. Таким образом, идентификаторы сообщений и адреса узлов могут находится в любом поле сообщения (в поле арбитража или в поле данных, или присутствовать и там, и там). Точно также протокол не запрещает использовать поле арбитража для передачи данных.
Утилизация поля арбитража и поля данных, и распределение адресов узлов, идентификаторов сообщений и приоритетов в сети является предметом рассмотрений так называемых протоколов высокого уровня (HLP — Higher Layer Protocols). Название HLP отражает тот факт, что протокол CAN описывает только два нижних уровня эталонной сетевой модели ISO/OSI, а остальные уровни описываются протоколами HLP.
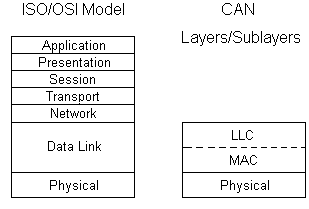 Рис. 4. Логическая структура протокола CAN.
Рис. 4. Логическая структура протокола CAN.
Существует множество таких высокоуровневых протоколов. Наиболее распространенные из них это:
- DeviceNet
- CAL/CANopen
- SDS
- CanKingdom
Физичекий уровень протокола CAN
Физический уровень (Physical Layer) протокола CAN определяет сопротивление кабеля, уровень электрических сигналов в сети и т.п. Существует несколько физических уровней протокола CAN (ISO 11898, ISO 11519, SAE J2411).
В подавляющем большинстве случаев используется физический уровень CAN определенный в стандарте ISO 11898. ISO 11898 в качестве среды передачи определяет двухпроводную дифференциальную линию с импедансом (терминаторы) 120 Ом (допускается колебание импеданса в пределах от 108 Ом до 132 Ом. Физический уровень CAN реализован в специальных чипах — CAN приемо-передатчиках (transceivers), которые преобразуют обычные TTL уровни сигналов используемых CAN-контроллерами в уровни сигналов на шине CAN. Наиболее распространенный CAN приемо-передатчик — Phillips 82C250, который полностью соответствует стандарту ISO 11898.
Махимальная скорость сети CAN в соответствие с протоколом равна 1 Mbit/sec. При скорости в 1 Mbit/sec максимальная длина кабеля равна примерно 40 метрам. Ограничение на длину кабеля связано с конечной скоростью света и механизмом побитового арбитража (во время арбитража все узлы сети должны получать текущий бит передачи одновременно, те сигнал должен успеть распространится по всему кабелю за единичный отсчет времени в сети. Соотношение между скоростью передачи и максимальной длиной кабеля приведено в таблице:
| скорость передачи | максимальная длина сети |
| 1000 Кбит/сек | 40 метров |
| 500 Кбит/сек | 100 метров |
| 250 Кбит/сек | 200 метров |
| 125 Кбит/сек | 500 метров |
| 10 Кбит/сек | 6 километров |
Разъемы для сети CAN до сих пор НЕ СТАНДАРТИЗОВАНЫ. Каждый протокол высокого уровня обычно определяет свой тип разъемов для CAN-сети.
The Controller Area Network (CAN) bus is a widely used communication protocol in modern vehicles, industrial machinery, and other applications that require real-time data exchange between electronic control units (ECUs). However, like any other communication system, the CAN bus can encounter issues that can lead to malfunctioning of the network and Troubleshooting CAN Bus Issues is very important. In this article, we will discuss some of the common CAN bus issues and troubleshoot those CAN Bus Issues.
Bus Off Error:
The Bus Off error is one of the most common and critical issues that can occur in a Controller Area Network (CAN) bus network. It occurs when a node on the CAN bus sends too many error frames, leading to the node being disconnected from the network.
When a node detects an error on the network, it sends an error frame to all other nodes on the bus. If a node repeatedly sends error frames without receiving any acknowledgment, the node goes into a Bus Off state. In this state, the node stops transmitting on the network, and it is disconnected from the bus.
A Bus Off error can be caused by several factors, including faulty wiring, incorrect termination, or a malfunctioning transceiver. In addition, the Bus Off error can also be caused by software errors, such as a poorly implemented error handling algorithm.
When a Bus Off error occurs, it is essential to troubleshoot and fix the issue as quickly as possible to ensure the optimal performance of the network. To troubleshoot this error, start by checking the physical layer of the network. Verify that the cables are connected correctly, and the termination resistors are present and of the correct value. Also, check the transceiver for any signs of damage or malfunction.
To prevent Bus Off errors, it is recommended to follow the proper installation guidelines and best practices for CAN bus networks. This includes using high-quality cables and connectors, ensuring correct termination, and implementing error handling algorithms correctly.
Bit Errors:
Bit errors are another common issue that can occur in a Controller Area Network (CAN) bus network. A bit error occurs when the signal on the CAN bus is distorted, leading to incorrect data transmission. This can result in corrupted messages or even complete communication failure between nodes on the network.
Bit errors can be caused by a variety of factors, including electrical noise, voltage fluctuations, and electromagnetic interference. The most common cause of bit errors is noise, which can originate from a variety of sources, including power supplies, motors, and electrical wiring.
To troubleshoot bit errors, start by checking the wiring and ensuring that the cables are well-shielded to prevent electrical interference. It is also important to check the ground connections and the power supply to ensure they are stable. Using high-quality cables and connectors can help prevent bit errors from occurring in the first place.
It is also important to note that bit errors can accumulate over time, leading to a gradual degradation of network performance. To prevent this, it is essential to implement error detection and correction algorithms. For example, CAN uses a bit stuffing mechanism that adds additional bits to the data stream to ensure that bit errors are detected and corrected.
Frame Errors:
Frame errors are another type of error that can occur in a Controller Area Network (CAN) bus network. A frame error occurs when the CAN controller detects an error in the message frame being transmitted. This error can result in a corrupted message or even complete communication failure between nodes on the network.
Frame errors can be caused by several factors, including electrical noise, incorrect bus timings, and improper wiring or termination. For example, if the CAN controller detects a bit level that is different from the expected value during the message transmission, it will generate a frame error.
To troubleshoot frame errors, start by checking the wiring and ensuring that the cables are well-shielded to prevent electrical interference. Also, check the bus timing and ensure that it is set correctly to prevent timing-related issues. It is also essential to ensure that the termination is correct and that the termination resistors are present and of the correct value.
In addition, it is crucial to check the message length and data format to ensure that they are correct. For example, if the message length is too long, it can result in a frame error.
To prevent frame errors, it is recommended to follow best practices for wiring and termination, use high-quality cables and connectors, and ensure that the bus timing is set correctly. Implementing error detection and correction algorithms can also help detect and correct frame errors before they cause significant issues on the network.
Stuck-at Dominant/Recessive:
Stuck-at Dominant and Stuck-at Recessive are types of errors that can occur in a Controller Area Network (CAN) bus network. These errors occur when a node on the network becomes unable to switch from a dominant (logic low) or recessive (logic high) state, resulting in incorrect data transmission.
A Stuck-at Dominant error occurs when a node is stuck in a dominant state and is unable to switch to a recessive state. This can cause the node to continually transmit dominant bits, leading to communication failures on the network.
On the other hand, a Stuck-at Recessive error occurs when a node is stuck in a recessive state and is unable to switch to a dominant state. This can cause the node to continually transmit recessive bits, also leading to communication failures on the network.
Stuck-at errors can be caused by several factors, including damaged or faulty transceivers, damaged wiring or connectors, or problems with the power supply. To troubleshoot these errors, start by checking the wiring and connectors for any damage or loose connections. Also, check the power supply and ensure that it is providing stable and sufficient power to the network.
To prevent Stuck-at errors, it is recommended to use high-quality transceivers and follow best practices for wiring and connectors. Implementing error detection and correction algorithms, such as the CRC (Cyclic Redundancy Check), can also help detect and correct these errors before they cause significant issues on the network.
Missing ACK
Missing ACK (Acknowledgment) is another common issue that can occur in a Controller Area Network (CAN) bus network. In CAN, ACK is a signal that is sent by the receiving node to acknowledge that it has received a message from the transmitting node. When a transmitting node does not receive an ACK signal, it assumes that the message was not received correctly, and a communication failure can occur.
Missing ACKs can be caused by several factors, including incorrect termination, network overload, and incorrect or damaged wiring or connectors. For example, if the CAN bus is not properly terminated, it can cause reflections that can interfere with the ACK signal, resulting in a missing ACK.
To troubleshoot missing ACKs, start by checking the wiring and connectors for any damage or loose connections. Also, check the termination and ensure that it is correct and properly installed. It is also important to check the network load and ensure that it is not too high, which can cause delays in ACK signals.
To prevent missing ACKs, it is recommended to follow best practices for wiring and termination and use high-quality cables and connectors. Implementing error detection and correction algorithms, such as the CRC (Cyclic Redundancy Check), can also help detect and correct missing ACKs before they cause significant issues on the network.
In conclusion, the CAN bus is a powerful communication protocol that enables real-time data exchange between electronic control units. However, like any other communication system, it can encounter issues that can lead to malfunctioning of the network and Troubleshooting CAN Bus Issues is critical. By understanding the common problems and their solutions, you can troubleshoot and fix CAN bus issues quickly and efficiently, ensuring optimal performance of the network.
Когда мы говорим о сетях, особенно об автомобильной сети CAN (Controller Area Network), иногда могут возникнуть различные сбои и ошибки. Одна из таких ошибок называется «Bus off». Что это такое и как ее исправить — давайте разберемся вместе.
Ошибка «Bus off» означает, что устройство, подключенное к шине CAN, было отключено от сети из-за проблем с передачей данных. Возможным причинами могут быть перегрев устройства, неправильное использование буферов или пропуск сообщений.
Когда устройство обнаруживает ошибку «Bus off», оно переходит в специальный режим отключения, чтобы не препятствовать работе других устройств в сети. Однако это также означает, что устройство больше не может передавать данные по шине CAN и требует специального вмешательства для восстановления.
Исправление ошибки «Bus off» может быть сложным процессом и зависит от конкретных обстоятельств. Некоторые возможные шаги включают проверку и замену перегретых компонентов, перезагрузку устройства, очистку буферов и анализ и исправление пропущенных сообщений. В некоторых случаях может потребоваться связь с производителем устройства или специалистами в области сетей CAN.
Содержание
- Что такое ошибка «Bus off»?
- Общая информация о проблеме
- Причины возникновения ошибки
- Влияние ошибки на работу системы
- Как исправить ошибку «Bus off»?
- 1. Проверьте физическое подключение
- 2. Проверьте настройки устройства
- 3. Проверьте устройства на шине CAN
- 4. Проверьте другие устройства на шине CAN
Что такое ошибка «Bus off»?
Ошибки «Bus off» возникают, когда устройство, подключенное к CAN-шине, перестает получать сообщения с шины в течение определенного периода времени. Это может произойти, если в процессе передачи данных произойдет сбой или если некорректные данные будут переданы по шине.
Когда происходит ошибка «Bus off», устройство, вызвавшее ошибку, автоматически отключается от шины и больше не может отправлять или принимать сообщения. В некоторых случаях, чтобы исправить ошибку «Bus off», может потребоваться перезагрузить устройство или проверить и исправить физические соединения и настройки CAN-шин.
Ошибки «Bus off» могут иметь различные причины, включая несоответствие протоколу CAN, электрические помехи, повреждение кабелей или неправильные настройки устройств на шине.
Важно знать, как исправить ошибку «Bus off», чтобы сохранить нормальную работу системы или оборудования, подключенного к CAN-шине. Обычно для этого требуется диагностика и исправление физических проблем, настройка параметров CAN-шин и устранение потенциальных источников помех.
Общая информация о проблеме
Одной из причин ошибки «Bus off» может быть слишком высокий уровень ошибок на шине, превышающий пределы, установленные в системе. Это может произойти из-за неисправных устройств на шине, короткого замыкания, электромагнитных помех или других проблем в электрической схеме. В результате шина отключается для защиты от дальнейших ошибок и повреждений.
Исправление ошибки «Bus off» обычно требует выявления и устранения причин сбоя, что может быть вызовом для обычных водителей. В некоторых случаях может потребоваться обратиться к дилеру или специалисту по автомобильным системам для детальной диагностики и ремонта. Прежде чем пытаться самостоятельно исправить ошибку, рекомендуется ознакомиться с руководством по эксплуатации автомобиля или связаться с производителем системы CAN.
Причины возникновения ошибки
Ошибка «Bus off» может возникать по нескольким причинам:
1. Превышение предельного количества ошибок на шине CAN. Если количество ошибок достигает определенного уровня, контроллер шины может переключиться в состояние «Bus off». Это мера предосторожности, чтобы предотвратить дальнейшее нарушение работы шины.
2. Конфликты в адресации устройств. Если на шине присутствуют устройства с одинаковыми адресами, это может привести к ошибкам в обмене данными и, в конечном счете, к ошибке «Bus off». Конфликты в адресации должны быть определены и исправлены.
3. Неполадки в аппаратной части шины CAN. Если некоторые компоненты шины, такие как трансиверы, провода или разъемы, имеют дефекты или неисправности, это может привести к ошибке «Bus off». Проверка и замена проблемных компонентов может быть необходимой.
4. Неправильные настройки контроллера шины CAN. Некорректные настройки контроллера, такие как неправильная скорость передачи данных, формат фрейма или настройки фильтрации данных, могут вызвать ошибку «Bus off». Проверка и правильная настройка контроллера может быть необходима.
Влияние ошибки на работу системы
Ошибка «Bus off» может оказать серьезное влияние на работу системы, особенно в случае ее повторного возникновения. В результате этой ошибки, контроллер перестает передавать сообщения и принимать новые данные по шине. Это может привести к снижению производительности системы и временной недоступности определенных функций.
Когда возникает ошибка «Bus off», устройство не может отправить или принять сообщение, что может привести к некорректной работе системы в целом. Система может перестать отвечать на команды, подвиснуть или даже полностью выйти из строя.
Ошибки «Bus off» могут возникать по разным причинам, например, из-за неисправности в шине или неправильной конфигурации системы. Помимо этого, эта ошибка может быть вызвана некорректным программным обеспечением или неправильной работой устройств.
Исправление ошибки «Bus off» включает в себя изучение причин ее возникновения и затем принятие соответствующих мер. Это может включать в себя замену поврежденных компонентов, проверку и настройку программного обеспечения, а также исправление неправильной конфигурации системы.
В целом, ошибка «Bus off» имеет серьезное влияние на работу системы и требует немедленного вмешательства для ее исправления. Чем быстрее проблема будет обнаружена и устранена, тем меньше негативных последствий она окажет на работу системы в целом.
Как исправить ошибку «Bus off»?
Ошибка «Bus off» возникает на шине CAN (Controller Area Network) и свидетельствует о том, что устройство, подключенное к шине CAN, перешло в состояние отключено. Это может произойти по разным причинам, таким как проблемы с подключением, неисправности устройства или неправильная настройка. В данном разделе мы рассмотрим несколько возможных способов исправления ошибки «Bus off».
1. Проверьте физическое подключение
Первым шагом в исправлении ошибки «Bus off» является проверка физического подключения устройства к шине CAN. Убедитесь, что все кабели и разъемы надежно и правильно подключены. Проверьте целостность кабелей и их правильную экранировку. Если обнаружены какие-либо повреждения, замените кабели.
2. Проверьте настройки устройства
Другой распространенной причиной ошибки «Bus off» являются неправильные настройки устройства, подключенного к шине CAN. Проверьте настройки скорости передачи данных (битрейта) на устройстве и убедитесь, что они корректно совпадают с настройками на других устройствах на шине CAN. Также убедитесь, что устройство настроено в соответствии с правилами и протоколами шины CAN.
3. Проверьте устройства на шине CAN
Если проблема с ошибкой «Bus off» возникает только на одном конкретном устройстве, рекомендуется проверить это устройство на наличие неисправностей. Проверьте его питание, настройки и возможные ошибки в программном обеспечении. Если устройство неисправно, возможно, потребуется его замена или ремонт.
4. Проверьте другие устройства на шине CAN
Если ошибка «Bus off» возникает на нескольких устройствах на шине CAN, то проблема, скорее всего, кроется в самой шине или в ее конфигурации. Проверьте другие устройства на шине CAN на наличие неисправностей, подключение и настройки. Если возникают трудности с определением причины ошибки, рекомендуется обратиться к специалисту, который имеет опыт работы с шиной CAN и может помочь в решении проблемы.
В любом случае, если ошибка «Bus off» продолжает возникать, даже после выполнения вышеперечисленных шагов, необходимо провести дополнительную диагностику и обратиться за помощью к профессионалам в данной области.
BusOff — это состояние ошибки контроллера CAN. Только передатчик может переключиться в состояние BusOff, если счетчик ошибок передачи превышает 255.

Содержание
- Что такое состояние отключения шины в CAN?
- Может ли сетевая шина отключиться?
- Механизм восстановления отключения шины CAN?
- CAN-контроллер CAN-шина отключена?
- Как исправить ошибку bus-off?
- Физический интерфейс шины CAN?
- Как устранить неполадки в CAN-шине?
- Инструменты для тестирования шины CAN?
- Шина CAN Ошибка квитирования?
- Формат данных шины CAN?
- Как подключиться к CAN-шине?
- Программное обеспечение шины CAN бесплатно?
- Тестер шины CAN Fluke?
- Что за ошибка в CAN шине?
- Учебники по шине CAN?
- Шина CAN против OBD2?
- Программные средства шины CAN?
- Программное обеспечение шины CAN с открытым исходным кодом?
- Расположение резистора шины CAN?
- Как диагностировать систему шины CAN?
- Как сделать ошибку в CAN?
- Кадр перегрузки шины CAN?
- Учебник по шине CAN для начинающих?
- Как узнать, есть ли в моей машине шина CAN?
- Средство диагностики шины CAN?
- Ошибка CAN-шины?
- Ошибки протокола шины CAN?
- CAN шина OBD2?
- Контур заземления шины CAN?
- Кадр данных шины CAN?
Что такое состояние отключения шины в CAN?
Решение. Приложение CAN находится в состоянии отключения шины, когда состояние светодиода 1 постоянно горит зеленым, а светодиода 2 постоянно горит красным. Если «счетчик ошибок передачи» превышает 255, интерфейс CAN переходит в это состояние.
Может ли сетевая шина отключиться?
Узел запускается в режиме Error Active. Когда значение любого из двух счетчиков ошибок превысит 127, узел перейдет в состояние, известное как пассивная ошибка, а когда значение счетчика ошибок передачи превысит 255, узел перейдет в состояние отключения шины.
Механизм восстановления отключения шины CAN?
Восстановление отключения шины CANВыключение шины CAN — это состояние ошибки контроллера CAN, которое может быть установлено только узлом передатчика, когда значение счетчика ошибок передачи превышает 255. производители контроллеров позволяют приложению принимать решение о его реализации. … Кристиан Розу.
CAN-контроллер CAN-шина отключена?
BusOff — это состояние ошибки контроллера CAN. Только передатчик может переключаться в состояние BusOff, если счетчик ошибок передачи превышает 255. В реальной жизни CAN-контроллер может переключаться в режим ErrorPassive спорадически.
Как исправить ошибку bus-off?
оправиться от Bus-Off. Наилучший случай — в состоянии ожидания (когда состояние шины является рецессивным), предположим, что скорость передачи данных составляет 1 Мбит/с (поэтому 1 битное время равно 1 мкс), вам нужно всего подождать 128*11*1 мкс = 1408 мкс.
Физический интерфейс шины CAN?
Спецификация локальной сети контроллеров (CAN) определяет канальный уровень, ISO 11898 определяет физический уровень. Шина CAN [CANbus] представляет собой симметричный (дифференциальный) двухпроводной интерфейс, работающий по экранированной витой паре (STP), неэкранированной витой паре (UTP) или ленточному кабелю.
Как устранить неполадки в CAN-шине?
Проверка порта CAN устройства. Отключите разъем от устройства. Измерьте сопротивление на контактах разъема устройства между CAN HI и CAN LOW. … Измерьте сопротивление между CAN HI и GROUND. … Измерьте сопротивление между CAN LOW и GROUND.
Инструменты для тестирования шины CAN?
CAN BUS Analyzer Tool — это простой в использовании недорогой монитор шины CAN, который можно использовать для разработки и отладки высокоскоростной сети CAN. Инструмент поддерживает CAN 2.0b и ISO11898-2, а также широкий спектр функций, которые позволяют использовать его в различных сегментах рынка, включая автомобильную, промышленную, медицинскую и морскую.
Шина CAN Ошибка квитирования?
Если нет даже одного положительного подтверждения, рецессивный слот ACK не перезаписывается каким-либо получателем, отправитель обнаруживает ошибку ACK и завершает текущую передачу сообщения, отправляя флаг ошибки. Ошибка ACK указывает на ошибку, вызванную отправителем или отсутствием получателей на шине.
Формат данных шины CAN?
Усовершенствованный CAN FD увеличивает длину раздела данных до 64 байтов на кадр. Сообщение передается последовательно на шину с использованием формата без возврата к нулю (NRZ) и может быть получено всеми узлами. Устройства, подключенные к сети CAN, обычно представляют собой датчики, исполнительные механизмы и другие устройства управления.
Как подключиться к CAN-шине?
Программное обеспечение шины CAN бесплатно?
CANdo — БЕСПЛАТНОЕ программное обеспечение для анализа шин CAN. Программное обеспечение CANdo Application предназначено для работы в сочетании с интерфейсом CANdo, чтобы обеспечить простой, но мощный инструмент для просмотра, регистрации и передачи сообщений в сети CAN.
Тестер шины CAN Fluke?
Fluke предлагает решение для устранения ошибок сигналов CAN-шины в автомобильных приложениях. Прочный промышленный осциллограф Fluke 125 Industrial ScopeMeter® не только позволяет выполнять подробные измерения сигналов, но и имеет функцию режима состояния шины, которая дает четкую индикацию хороших/плохих электрических сигналов на шине CAN и других шинах.
Что за ошибка в CAN шине?
Stuff Error возникает всякий раз, когда на шине обнаруживаются 6 последовательных битов одинакового значения. Всякий раз, когда передающее устройство обнаруживает 5 последовательных битов одинакового значения, оно автоматически вставляет дополненный бит в передаваемый битовый поток. Этот бит заполнения обнаруживается и автоматически удаляется всеми принимающими устройствами.
Учебники по шине CAN?
Шина CAN против OBD2?
Различия между OBD2 и шиной CAN Шина CAN — это протокол, который действует как режим связи между различными частями автомобиля или любого другого устройства, а OBD 2, с другой стороны, представляет собой более высокий уровень протокола, другими словами, язык, используемый для диагностических функций.
Программные средства шины CAN?
CAN BUS Analyzer Tool — это простой в использовании недорогой монитор шины CAN, который можно использовать для разработки и отладки высокоскоростной сети CAN. Инструмент поддерживает CAN 2.0b и ISO11898-2, а также широкий спектр функций, которые позволяют использовать его в различных сегментах рынка, включая автомобильную, промышленную, медицинскую и морскую.
Программное обеспечение шины CAN с открытым исходным кодом?
BUSMASTER — это программное обеспечение для ПК с открытым исходным кодом для проектирования, мониторинга, анализа и моделирования сетей CAN. BUSMASTER был задуман, спроектирован и разработан RBEI и основан на программном инструменте CANvas.
Расположение резистора шины CAN?
Терминатор шины CAN. На каждом конце шины должен быть установлен согласующий резистор на 120 Ом, чтобы предотвратить отражение сигнала. Когда вы измеряете сопротивление между CAN HI и CAN LOW на жгуте проводов, вы должны измерить 60 Ом. Это измерение следует проводить при выключенном питании прибора.
Как диагностировать систему шины CAN?
Проверка порта CAN устройства. Отключите разъем от устройства. Измерьте сопротивление на контактах разъема устройства между CAN HI и CAN LOW. … Измерьте сопротивление между CAN HI и GROUND. … Измерьте сопротивление между CAN LOW и GROUND.
Как сделать ошибку в CAN?
1 ОтветКупите коммерческий инструмент разработки CAN. … Используйте бродячий провод, чтобы «поцарапать» сетевые провода. … Создайте крошечные импульсы, и с помощью простой транзисторной схемы, подключенной к линии CAN, эти импульсы будут прерывать сообщения. … Программно сгенерируйте кадр CAN с ошибками, которые вы хотите ввести, путем битового удара.
Кадр перегрузки шины CAN?
Кадр перегрузки содержит два битовых поля Флаг перегрузки и Разделитель перегрузки. Существует два вида условий перегрузки, которые могут привести к передаче флага перегрузки: Внутренние условия приемника, которые требуют задержки следующего кадра данных или удаленного кадра.
Учебник по шине CAN для начинающих?
Как узнать, есть ли в моей машине шина CAN?
Как узнать, оснащен ли мой автомобиль CAN-шиной? Если автомобиль предупреждает вас о перегоревшей лампочке, он оснащен шиной CAN. Самый простой способ — обратиться к поставщику автомобиля или в дилерский центр. Если вы все еще не уверены, мы обычно просим клиентов выключить фары и проехать на автомобиле, чтобы увидеть, подает ли он предупреждение.
Средство диагностики шины CAN?
CAN BUS Analyzer Tool — это простой в использовании недорогой монитор шины CAN, который можно использовать для разработки и отладки высокоскоростной сети CAN. Инструмент поддерживает CAN 2.0b и ISO11898-2, а также широкий спектр функций, которые позволяют использовать его в различных сегментах рынка, включая автомобильную, промышленную, медицинскую и морскую.
Ошибка CAN-шины?
Stuff Error возникает всякий раз, когда на шине обнаруживаются 6 последовательных битов одинакового значения. Всякий раз, когда передающее устройство обнаруживает 5 последовательных битов одинакового значения, оно автоматически вставляет дополненный бит в передаваемый битовый поток. Этот бит заполнения обнаруживается и автоматически удаляется всеми принимающими устройствами.
Ошибки протокола шины CAN?
Типы ошибок шины CAN Битовая ошибка CAN возникает, когда отслеживаемое значение отличается от отправляемого значения. Например, если узел передает на шину доминантный (0) и обнаруживается рецессивный (1), это вызовет битовую ошибку. Битовая ошибка также может быть обнаружена путем заполнения.
CAN шина OBD2?
CAN — это метод связи (например, телефон). В частности, стандарт OBD2 определяет разъем OBD2, в т.ч. набор из пяти протоколов, на которых он может работать (см. ниже). Кроме того, с 2008 года шина CAN (ISO 15765) является обязательным протоколом для OBD2 во всех автомобилях, продаваемых в США.
Контур заземления шины CAN?
Петли заземления возникают, когда цепи шинных узлов в удаленных местах используют местную землю в качестве опорного потенциала. В этом случае обратные токи сигнала не могут течь обратно к потенциалу земли драйвера-источника по прямому пути.
Кадр данных шины CAN?
Сообщение или кадр состоит в основном из идентификатора (идентификатора), который представляет приоритет сообщения, и до восьми байтов данных. CRC, слот подтверждения [ACK] и другие служебные данные также являются частью сообщения. Усовершенствованный CAN FD увеличивает длину раздела данных до 64 байтов на кадр.
I know this is an old thread, but the answers are a bit different from the situation I have observed, in relation to the OP question.
From experience, I’m have an issue where my ECU stops communicating with the diagnostic tools while the engine is running, apparantly it has entered the CAN off state. The only reason I know is I have a OBD 2 plug in monitor for engine parameters. I don’t get ANY DTC, well most of the time anyways.. sometimes I get DTCs that are not applicable to my vehcile, and some U codes.
That said, the vehicle continues to run just fine, and if I didn’t have the plug-in monitor, I would have no idea there was a problem! I’m now pretty sure the ECU for the Engine is having communication problems, and hitting the error counter and shutting off, it’s the only thing that makes sense. I checked the CAN signals with a 2 channel O-scope, and they are a bit noisy compared to one of my other cars, so my next step is to swap the ECU and see if that fixes it. I already swapped out the TIPM (Total Integrated Power Module), it serves as a router of sorts between the 2 CAN networks, to the OBD2 port. That apparantly wasn’t it.