Время на прочтение
7 мин
Количество просмотров 17K
Продолжаем публикацию лекций по курсу «Управление в Технических Системах» автор — Олег Степанович Козлов на кафедре Э7 МГТУ им. Н.Э. Баумана.
Данные лекции готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется. В предыдущих сериях:
1. Введение в теорию автоматического управления.
2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.3 — 2.8, 2.9 — 2.13.
3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕГУЛИРОВАНИЯ.
3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ. 3.2. Типовые звенья систем автоматического управления регулирования. Классификация типовых звеньев. Простейшие типовые звенья. 3.3. Апериодическое звено 1–го порядка инерционное звено. На примере входной камеры ядерного реактора. 3.4. Апериодическое звено 2-го порядка. 3.5. Колебательное звено. 3.6. Инерционно-дифференцирующее звено. 3.7. Форсирующее звено. 3.8. Инерционно-интегрирующее звено (интегрирующее звено с замедлением). 3.9. Изодромное звено (изодром). 3.10 Минимально-фазовые и не минимально-фазовые звенья. 3.11 Математическая модель кинетики нейтронов в «точечном» реакторе «нулевой» мощности. 4 Структурные преобразования систем автоматического регулирования.
Будет как всегда позновательной увлекательно и жестко
5.1. Главная передаточная функция. Передаточные функции по возмущающему воздействию и для ошибки (рассогласования)
Используя структурные преобразования (см. раздел 4), структурную схему практически любой линейной или линеаризованной САР (САУ) можно привести к виду:

Где функции по времени:
![]() — управляющее воздействие;
— управляющее воздействие;
![]() – регулируемая величина (выходное воздействие);
– регулируемая величина (выходное воздействие);
![]() – возмущающее воздействие;
– возмущающее воздействие;
Или в изображениях:

Определение: Если единичная обратная связь охватывает все элементы (звенья) САР – она называется главной.
Определение: Если главная обратная связь отсутствует — САР считается разомкнутой.
Передаточная функция ![]() может быть любой сложности (т.е. содержать местные обратные связи, параллельные и последовательные цепи и т.д.).
может быть любой сложности (т.е. содержать местные обратные связи, параллельные и последовательные цепи и т.д.).
Возмущающих воздействий может быть несколько и приложены они могут быть в любом месте структурной схемы.
Передаточную функцию ![]() которую в Теории Управления называют передаточной функцией разомкнутой САР, будем представлять в следующем виде (для единообразия):
которую в Теории Управления называют передаточной функцией разомкнутой САР, будем представлять в следующем виде (для единообразия):

где ![]() – общий коэффициент усиления;
– общий коэффициент усиления; ![]() – полиномы по степеням переменной
– полиномы по степеням переменной ![]() , причем свободные члены в них равны 1 (единице).
, причем свободные члены в них равны 1 (единице).
Учитывая, что САР линейна или линеаризована, разделим на структурной схеме каналы прохождения управляющего и возмущающего воздействий. Выделим в отдельное звено (может быть и очень сложное) ту часть системы, через которую проходит возмущающее воздействие![]() обозначим ее через
обозначим ее через ![]() Структурная схема САР принимает вид:
Структурная схема САР принимает вид:

где: ![]()
В Теории Управления используют 3 основных передаточных функций замкнутой САР:
-
главная передаточная функция
 ;
; -
передаточная функция по возмущающему воздействию
 ;
; -
передаточная функция для ошибки (рассогласования)

Рассмотрим более подробно вышеупомянутые передаточные функции.
Главная передаточная функция
Главная передаточная функция -передаточная функция по управляющему воздействию математическое определение этой передаточной функции:

выведем формулу при условии если возмущеющие воздействие равно ![]() . «Обойдем» структурную схемв по контуру:
. «Обойдем» структурную схемв по контуру:
![Y(s)= E(s)\cdot W(s)=\left[ X(s)-Y(s)\right]\cdot W(s)\Rightarrow\\Y(s)=X(s)\cdot W(s)-Y(s)\cdot W (s) \Rightarrow\\Y(s)+Y(s)\cdot W(s)=X(s)\cdot W(s)\Rightarrow\\ \frac{Y(s)}{X(s)}=\frac{W(s)}{1+W(s)};](https://habrastorage.org/getpro/habr/upload_files/533/b53/27c/533b5327c62d984a9e78e213d2c38f23.svg)

Примечание. Формула (5.3) совпадает с формулой для передаточной функции цепи с местной единичной обратной связью (см. раздел 4 – «Структурные преобразования»).
Подставляя вместо ![]() ее выражение через полиномы
ее выражение через полиномы ![]() и
и ![]()

где: ![]()
Анализ выражения (5.4) показывает, что свойства главной передаточной функции замкнутой САР однозначно определяются свойствами разомкнутой САР, т.е. через полиномы ![]() и
и ![]() .
.
Передаточная функция замкнутой САР по внешнему возмущающему воздействию
Дадим математическое определение рассматриваемой передаточной функции если управляющие воздействи ![]() , а возмущеющие воздействие отличное от нуля
, а возмущеющие воздействие отличное от нуля ![]() . В этом случае (см. рисунок 5.1.2) получается:
. В этом случае (см. рисунок 5.1.2) получается:

Перрейдем к изображением и «обойдем» схему (см. рис. 5.1.2) по контуру
![Y(s)=Y_1(s)+Y_2(s) =E(s)\cdot W(s)+F(s)\cdot M(s)=\\=-Y(s)\cdot W(s)+F(s)\cdot M(s) \Rightarrow\\Y(s)\cdot[1+W(s)]=F(s)\cdot M(s)\Rightarrow \frac{Y(s)}{F(s)}=\frac{M(s)}{1+W(s)};](https://habrastorage.org/getpro/habr/upload_files/e60/312/292/e60312292fce91254fe8e221758baf77.svg)

Подставляя вместо ![]() ее выражение через полиномы
ее выражение через полиномы ![]() и
и ![]() получаем:
получаем:

где: ![]() — вид данного полинома зависит от места приложения возмущающего воздействия;
— вид данного полинома зависит от места приложения возмущающего воздействия;
Формулы 5.4 и 5.6 имеют общий занаменатель ![]()
Передаточная функция замкнутой САР для ошибки (рассогласования)
Дадим математическое определение рассматриваемой передаточной функции если управляющие воздействиt отлично от 0 ![]() , а возмущеющие воздействие равно 0
, а возмущеющие воздействие равно 0 ![]() . В этом случае для передаточной функции получается (см. рис. 5.1.2):
. В этом случае для передаточной функции получается (см. рис. 5.1.2):

Сделаем вывод соответствующих формул, выполнив «обход» по контуру схемы (см. рис. 5.1.2) ![]()

![]()
Учитывая формулу для главной передаточной функции  можно записать выражения для передаточной функции рассоглаосвания:
можно записать выражения для передаточной функции рассоглаосвания:
![]()
Подставляя вместо ![]() ее выражение через полиномы
ее выражение через полиномы ![]() и
и ![]() получаем:
получаем:

где: ![]()
Опять замечаем, что знаменатель передаточной функции ![]() равен полиному
равен полиному ![]() следовательно, характерным признаком передаточных функций замкнутой САР является общность знаменателей ! ! !
следовательно, характерным признаком передаточных функций замкнутой САР является общность знаменателей ! ! !
В Теории Управления выражение ![]() имеет «собственное» название: характеристический полином замкнутой САР.
имеет «собственное» название: характеристический полином замкнутой САР.
5.2 Уравнения динамики замкнутой САР
Как указывалось в подразделе 5.1, любую замкнутую САР можно привести к виду представленному на рисунке 5.2.1:

Выведены соотношения для 3-х основных передаточных функций замкнутой САР позволяют записать выражения для регулируемой величины в изображениях:

Подставляя значения ![]() и
и ![]() через полиномы
через полиномы  и
и ![]() разомкнутой САР получаем:
разомкнутой САР получаем:

подставим значения для характеристического полинома ![]() получим выражение для динамического уравнения замкнутой САР в изображениях:
получим выражение для динамического уравнения замкнутой САР в изображениях:
![]()
Переходя к оригиналам получаем символическую форму записи обыкновенного дифференциального уравнения замкнутой САР:
![]()
Решение диференциального уравнения состоит из двух частей:
![]()
где: ![]() — собственная часть, решение однородного дифференциального уравнения
— собственная часть, решение однородного дифференциального уравнения ![]() ;
;
![]() — вынужденная часть решения (частное решение), определяемая правой частью уравнения ( 5.2.3 ).
— вынужденная часть решения (частное решение), определяемая правой частью уравнения ( 5.2.3 ).
Решения однородного уравнения замкнутой САР:
![]()
записываем соответствующее характеристическое уравнение:
![]()
находим корни степенного уравнения ![]() если все корни уравнения разные:
если все корни уравнения разные:

Если есть совпадающие корни характеристического уравнения, то формула для ![]() изменится (см. Математическое описание систем автоматического управления).
изменится (см. Математическое описание систем автоматического управления).
Обычно ![]() находят по виду правой части уравнения (5.2.3) или, используя другие методы (например, метод вариаций постоянных).
находят по виду правой части уравнения (5.2.3) или, используя другие методы (например, метод вариаций постоянных).
Необходимо отметить, что порядок дифференциального уравнения (5.2.3) равен «n», т.е. такой же, как и у разомкнутой САР ![]()
![]()
если нет возмущающего воздействия, т.к. порядок дифференциального оператора L(p) обычно значительно выше, чем N(p).
По аналогии с выводом уравнения (5.2.3) можно получить уравнение динамики для рассогласования ![]() :
:
![]()
подставляя значения ![]() и
и ![]() (см. 5.6 и 5.9) получаем:
(см. 5.6 и 5.9) получаем:

![]()
Уравнение (5.2.5)- уравнение динамики замкнутой САР в ихображениях для рассогласования (ошибки) при наличии управляющего и возмущающего воздействий.
Особенностью данного уравнения (5.2.5) является то, что левая часть его практически совпадает с левой частью (5.2.2), в то время, как порядок правой части заметно выше , т.к. порядок многочленов D (s) и L (s) — одинаков, а порядок N(s) меньше L(s).
Это означает, что внешние воздействия ![]() и
и ![]() влияют на
влияют на ![]() более сильным образом.
более сильным образом.
Дифференциальное уравнение замкнутой САР для ошибки:
![]()
Способы решения уравнения ( 5.2.6 ) такие же, как и для уравнения ( 5.2.3 ) .
5.3. Частотные характеристики замкнутой САР.
Наибольший интерес при анализе замкнутых САР имеет АФЧХ замкнутой САР по управляющему воздействию:

где передаточная функция:

Учитывая, что ![]() — комплексное число, по аналогии имеем:
— комплексное число, по аналогии имеем:
![]()
Где ![]() — вещественная часть функции,
— вещественная часть функции, ![]() — мнимая часть функиции.
— мнимая часть функиции.

На этих рисунках представлен «примерный» вид зависимостей P (w)и Q(w) для «какой-то» замкнутой САР причем P(w) — четная функция, т.е. P(w) = P(-w); Q(w) — нечетная функция, т.е. Q(w) = — Q(-w).
Если известны частотные свойства разомкнутой САР, то можно определить частотные свойства замкнутой САР. Воспользуемся показательной формой для АФЧХ
![]()
Где ![]() — амплитуда (модуль),
— амплитуда (модуль), ![]() — сдвиг фазы (фаза). Подставляя это в (5.3.1), имеем получаем:
— сдвиг фазы (фаза). Подставляя это в (5.3.1), имеем получаем:



Учитывая, что ![]()
![\frac{cos[\varphi_з(\omega)]}{A_з(\omega)}-i\cdot\frac{sin[\varphi_З(\omega)]}{A_з(\omega)}=1+\frac{cos[\varphi(\omega)]}{A(\omega)}-i\cdot\frac{sin[\varphi(\omega)]}{A(\omega)}\ \ \ \ \ \ \ \mathbf{(5.3.4)}](https://habrastorage.org/getpro/habr/upload_files/0ee/6c9/fff/0ee6c9fff38a2886fbd26e8539fe9f16.svg)
Приравнивая чисто вещественные и чисто мнимые части, имеем ![]()
![\left \{ \begin {align}\frac{cos[\varphi_з(\omega)]}{A_з(\omega)}&=1+\frac{cos[\varphi(\omega)]}{A(\omega)} \ \ \ \ \ (1)\\ \frac{sin[\varphi_з(\omega)]}{A_з(\omega)}&=\frac{sin[\varphi(\omega)]}{A(\omega)} \ \ \ \ \ \ \ \ \ \ \ \ (2). \end{align} \right. \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \mathbf{(5.3.5)}](https://habrastorage.org/getpro/habr/upload_files/479/403/736/479403736dd1cdc754d7d0c02286d684.svg)
Для нахождения амплитуды ![]() и сдвига фазы
и сдвига фазы ![]() замкнутой передаточной функции как функции от амплитуды
замкнутой передаточной функции как функции от амплитуды ![]() и сдвига фазы
и сдвига фазы ![]() разомкнутой системы. Разделив (2) на (1) получим:
разомкнутой системы. Разделив (2) на (1) получим:
![tg[\varphi_з(\omega)]=\frac{sin[\varphi(\omega)]}{A(\omega)+cos[\varphi(\omega)]} \Rightarrow](https://habrastorage.org/getpro/habr/upload_files/eeb/871/1b5/eeb8711b54b25f3d889122eb05ef36e8.svg)
Сдвиг фазы замкнутой системы через характеристики разомкнутой системы:
![\varphi_з(\omega) = arctg \left[ \frac{sin[\varphi(\omega)]}{A(\omega)+cos[\varphi(\omega)]}\right] - \pi\cdot j \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \mathbf{(5.3.6)}](https://habrastorage.org/getpro/habr/upload_files/ee9/55d/68b/ee955d68bb8b2bd1431df4a97288c76b.svg)
Для получения амплитуды замкнутоей системы возведем оба уравнения системы (5.3.5) в квадрат: ![]()
![\left \{ \begin {align}\frac{cos^2[\varphi_з(\omega)]}{A^2_з(\omega)}&=1+\frac{cos^2[\varphi(\omega)]}{A^2(\omega)}+2 \cdot\frac{cos[\varphi(\omega)]}{A(\omega)} ;\\ \frac{sin^2[\varphi_з(\omega)]}{A_з^2(\omega)}&=\frac{sin^2[\varphi(\omega)]}{A^2(\omega)} . \end{align} \right.](https://habrastorage.org/getpro/habr/upload_files/219/ee7/ae7/219ee7ae7f5dc5a482f636ec454ac335.svg)
складываем эти два уравнения:
![\frac{1}{A^2_з(\omega)}\left[\underbrace{cos^2\varphi_з(\omega)+sin^2\varphi_з(\omega)}_1\right]=1+\frac{1}{A^2(\omega)}\left[\underbrace{cos^2\varphi(\omega)+sin^2\varphi(\omega)}_1\right]+\dots\\\dots+2\frac{cos[\varphi(\omega]}{A(\omega)}](https://habrastorage.org/getpro/habr/upload_files/351/b0a/248/351b0a248c04b78364675da88b60ac84.svg)
![\frac{1}{A^2_з(\omega)}=\frac{A^2(\omega)+2\cdot A\cdot cos[\varphi(\omega)]+1}{A^2(\omega)}\Rightarrow](https://habrastorage.org/getpro/habr/upload_files/664/0b8/d74/6640b8d748b49f8ad9d25d74e59f8bd2.svg)
![A_з(\omega)=\frac{A(\omega)}{\sqrt{A^2(\omega)+2\cdot A(\omega)\cdot cos[\varphi(\omega)]+1}} \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \mathbf{(5.3.7)}](https://habrastorage.org/getpro/habr/upload_files/5a5/e45/83f/5a5e4583f0dbbab9d4b202518d7b3a81.svg)
Аналогичным образом можно выразить, например, P(w) и Q(w) — характеристики замкнутой САР через u(w) и u(w) — характеристики разомкнутой САР.
Пример
В качестве примера на рисунке 5.4.1 приведена модель помещения, в котором с помощью интегрирующего звена обеспечивается подвод тепла для поддержания температуры. Температура задается в виде ступенчатой функции. В качестве внешнего воздействия используется внешняя температура.

Передаточные функции построены средтвами автоматического анализа. Видно, что знаменатель главной передаточной функции и знаменатель передаточной функции по возмущающиму воздействию одинаковы.

График справа показывает расхождение результаты модели (зеленая линия) и передаточных функций (синит линя) в начале расчета, но потом функции сходятся. Расхождение объясняются разными начальными условиями по производным. Слева тот же самый график, но в это случае начальное состояние определено с помощю загрузки стационарного состояния, полученного предварительным моделированием. В этом случае совпадение модели и передаточных функций полное.
Ссылку на модель примера можено взять здесь…
Передаточная функция замкнутой системы по ошибке
Для замкнутой
системы существенной характеристикой
является ее ошибка
![]() .
.
Величину
ошибки можно найти, зная входное
воздействие и передаточную функцию
разомкнутой системы:
![]() ,
,
откуда
![]() .
.
С учетом
ошибки системы (характеризует точность
управления в системе) вводится
характеристика замкнутой системы,
называемая передаточной функцией
замкнутой системы по ошибке:
![]() .
.
Передаточная
функция замкнутой системы по ошибке
позволяет определить ошибку управления
в замкнутой системе в том случае, когда
необходимо обеспечить заданное значение
управляемой величины
![]() с заданной точностью. Эта характеристика
с заданной точностью. Эта характеристика
замкнутой системы позволяет оценивать
точность обеспечения заданного значения
управляемой величины (точность
управления).
Построение частотных характеристик системы
Структура
обыкновенной линейной системы
автоматического управления всегда
будет состоять из типовых звеньев,
рассмотренных выше. Эти звенья будут
входить в структуру в составе различных
соединений: последовательного,
параллельного, соединения с обратной
связью.
Передаточная
функция системы, состоящей из различных
соединений типовых звеньев, выразится
зависимостью вида
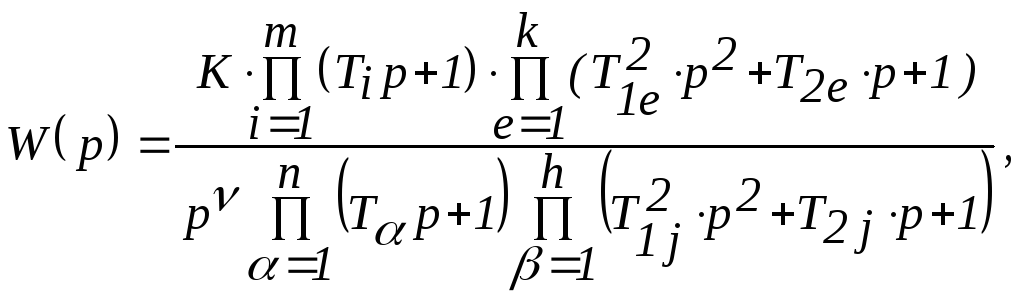 гдеK – коэффициент
гдеK – коэффициент
усиления системы.
Сомножители
вида
![]() ,
,
стоящие в знаменателе выражения,
соответствуют инерционным звеньям,
входящим в последовательные соединения.
Сомножители![]() в знаменателе соответствуют колебательным
в знаменателе соответствуют колебательным
звеньям, соединённым последовательно.
Предполагается, что в системеn
инерционных звеньев иhколебательных звеньев.
Параметр pв знаменателе передаточной функции
появляется при наличии в структуре
системы интегрирующих звеньев. Таких
звеньев может быть в системеν,
поскольку при наличии в системе
интегрирующего звена система становится
астатической, то число интегрирующих
звеньевνназываютстепенью
астатизма системы.
Структура
системы может содержать параллельные
соединения звеньев. Пусть, например, в
системе присутствует параллельное
соединение усилительного и интегрирующего
звена, тогда передаточная функция этого
соединения
 .
.
Из-за присутствия
в системе параллельного соединения
типовых звеньев в числителе передаточной
функции появляются сомножители вида
![]() .
.
Для обозначения таких сомножителей их
условно приписываютфорсирующим
звеньям первого порядка. Форсирующее
звено первого порядка имеет динамические
свойства, обратные свойствам инерционного
звена. Аналогично, сомножители вида![]() приписывают форсирующим звеньям
приписывают форсирующим звеньям
второго порядка, свойства которых
противоположны свойствам колебательного
звена.
Таким образом,
передаточная функция обыкновенной
линейной системы будет состоять из
произведений типовых сомножителей.
Поскольку каждый сомножитель соответствует
структурному звену с типовыми динамическими
свойствами, то и динамические свойства
системы в целом будут комбинацией
типовых свойств. Это обстоятельство, в
частности, позволяет упростить построение
частотных характеристик линейной
системы.
Сделав
подстановку
![]() в приведенное выше выражение для
в приведенное выше выражение для
передаточной функции системы, можно
перейти к частотной передаточной функции

модуль которой
![]()
Используя
последнее выражение для амплитудной
логарифмической частотной характеристики
системы, можно записать

В соответствии
с последним выражением для нахождения
суммарной амплитудной логарифмической
характеристики системы необходимо
построить ЛАХ для входящих в систему
звеньев, а затем геометрически их
суммировать.
Исходя из
общего выражения для частотной
передаточной функции, можно записать
выражение для фазового угла системы

Сомножители
числителя частотной передаточной
функции обеспечивают положительные
фазовые сдвиги, а сомножители знаменателя
– отрицательные. Фазовая частотная
характеристика системы получается
суммированием фазовых частотных
характеристик составляющих систему
типовых звеньев.
Асимптотическая
ЛАХ строится ещё проще, и ее построение
рассмотрим на примере. Пусть передаточная
функция системы имеет вид
![]()
тогда частотная передаточная функция
запишется в виде
![]()
а модуль частотной передаточной функции
![]()
Логарифмическая
амплитудная характеристика
![]()
при этом слагаемое
![]() будет влиять на ход характеристики при
будет влиять на ход характеристики при![]() ,
,
слагаемое![]() при
при![]() и т.д.
и т.д.
Частоты
![]() называются частотами сопряжения. Учет
называются частотами сопряжения. Учет
влияния каждого следующего звена при
построении асимптотической характеристики
ведется для частот, более высоких, чем
соответствующая частота сопряжения,
путем изменения наклона характеристики
на![]() ,
,
в зависимости от знака, стоящего перед
слагаемым (на -20 дБ/дек для инерционного
звена и +20 дБ/дек для форсирующего звена
первого порядка).
В результате суммарная асимптотическая
логарифмическая амплитудная характеристика
для рассматриваемого примера примет
вид, изображенной на рис. 72, где для
определенности принято
![]() .
.
Е сли
сли
одно из звеньев системы колебательное,
то на соответствующей ему частоте
сопряжения![]() наклон характеристики изменяется на
наклон характеристики изменяется на![]() (-40 дБ/дек для колебательного звена и
(-40 дБ/дек для колебательного звена и
+40 дБ/дек для форсирующего звена второго
порядка).
Общие правила построения асимптотической
ЛАХ линейной системы следующие:
-
асимптотическая ЛАХ состоит из
прямолинейных отрезков, имеющих разный
наклон к оси частот, кратный 20 дБ/дек; -
низкочастотный участок ЛАХ проходит
через точку
 и имеет наклон0 дБ/дек для статической
и имеет наклон0 дБ/дек для статической
системы и дБ/дек для астатической системы с
дБ/дек для астатической системы с
астатизмомνпорядка; -
влияние каждого звена на ЛАХ системы
учитывается начиная с частоты сопряжения,
определяемой постоянной времени звена; -
учет влияния звена сводится к изменению
наклона очередного отрезка ЛАХ на
частоте сопряжения следующим образом:
-
наклон увеличивается на –20 дБ/декдля инерционного звена,
-
наклон
уменьшается на +20 дБ/декдля
форсирующего звена первого порядка, -
наклон
увеличивается на –40 дБ/декдля
колебательного звена, -
наклон
уменьшается на +40 дБ/декдля
форсирующего звена второго порядка.
Суммарная
логарифмическая фазовая характеристика
получается суммированием фазовых
характеристик звеньев системы. Для
рассмотренного примера фазовая частотная
логарифмическая характеристика показана
на рис. 73: 1 – ЛФХ интегрирующего звена,
2 – ЛФХ форсирующего звена первого
порядка, 3 и 4 – ЛФХ инерционных звеньев,
5 – суммарная фазовая частотная
характеристика.
 Суммарная
Суммарная
фазовая характеристика 5 получена
суммированием ординат (с учетом знака)
фазовых характеристик звеньев. На рис.
73 положительная полуось фазовых углов
направлена вниз.
При построении
частотных характеристик системы замена
действительной ЛАХ асимптотической
ЛАХ для колебательного звена даёт
значительную погрешность при малой
степени успокоения звена. Если для
колебательного звена степень успокоения
выходит за пределы
![]() ,
,
то асимптотическая ЛАХ нуждается в
уточнении. Для этого строится точная
характеристика путем расчета точек по
формулам для колебательного звена (в
пределах![]() дек
дек
от частоты сопряжения). Учесть особенности
характеристики можно также, используя
график поправок для ЛАХ колебательного
звена, который приводится в литературе
по теории управления.
Соседние файлы в папке ТАУ
- #
- #
- #
Передаточные функции систем автоматического регулирования
[1].
Замкнутая система автоматического регулирования:
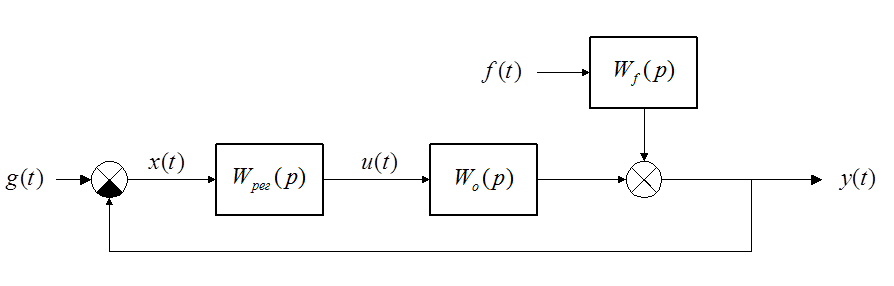
Здесь сам
объект регулирования представлен передаточной функцией ![]() ,
,
определяемой видом дифференциального уравнения, описывающего динамику объекта
регулирования (заданная функция). На его вход поступает управляющее воздействие
![]() .
.
Здесь ![]() – сигнал ошибки,
– сигнал ошибки, ![]() –
–
задающее воздействие, ![]() – регулируемая величина,
– регулируемая величина, ![]() – передаточная функция регулятора (предмет
– передаточная функция регулятора (предмет
разработки). Регулируемая величина определяется выражением:
![]() .
.
Здесь ![]() –
–
передаточная функция объекта регулирования по возмущению ![]() .
.
С учётом вида
управляющего воздействия:
![]() .
.
Здесь ![]() – передаточная функция по ошибке,
– передаточная функция по ошибке,
она же – передаточная функция разомкнутой системы.
Уравнение
замыкания
![]() .
.
В результате для регулируемой
величины:
 .
.
Для ошибки:
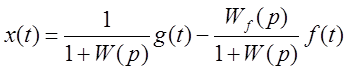 .
.
Передаточная
функция замкнутой системы и передаточная функция замкнутой системы по ошибке:
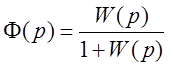 ,
,  .
.
Ведение
автоматического регулирования уменьшает отклонение регулируемой величины под
влиянием возмущений в ![]() раз.
раз.
Законы регулирования.
Закон
регулирования – зависимость управляющего воздействия от ошибки ![]() , задающего воздействия
, задающего воздействия ![]() и возмущения
и возмущения ![]() :
:
![]() .
.
В общем случае это нелинейная
функция x, u, f, а так же их производных и интегралов по времени.
Обычно же она имеет вид:
![]() .
.
Первое
слагаемое соответствует регулированию по отклонению (принцип Ползунова-Уатта),
второе и третье – регулированию по внешнему воздействию (принцип Понселе).
Линейный закон
регулирования по отклонению может иметь следующий вид:
 .
.
Пропорциональное
регулирование.
Пусть регулируемый
объект – звено статического типа: ![]() , или является таковым
, или является таковым
в установившемся состоянии (при ![]() ).
).
Управляющее
воздействие:
![]() .
.
Передаточная функция разомкнутой
системы:
![]()
– общий коэффициент усиления
разомкнутой системы.
При постоянном задающем
воздействии ![]() установившаяся ошибка, называемая в данном
установившаяся ошибка, называемая в данном
случае статической ошибкой
 .
.
Установившиеся ошибки по
регулированию и возмущению уменьшились в ![]() раз.
раз.
Коль скоро они не равны нулю, регулирование называется статическим.
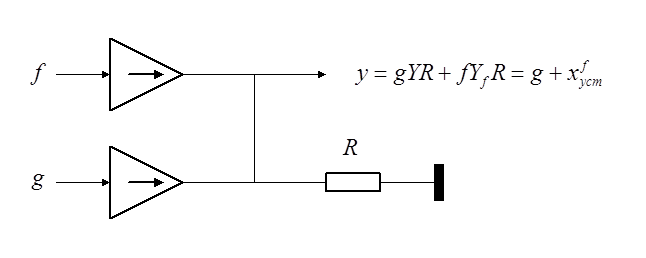
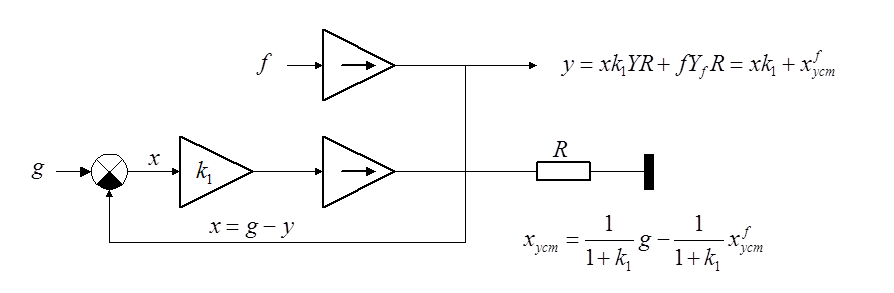
Пример.
Управляемые
напряжением генераторы тока сигнала и помехи работают на общую нагрузку. В
идеале ![]() (при
(при ![]() ).
).
Интегральное регулирование.
Пусть регулируемый
объект – звено статического типа: ![]() , или является таковым
, или является таковым
в установившемся состоянии (при ![]() ).
).
Управляющее
воздействие:
 .
.
Передаточная
функция разомкнутой системы:

Первая
составляющая ошибки при ![]() обращается в нуль,
обращается в нуль,
т.е. система является астатической по отношению к управляющему
воздействию. Что касается второй составляющей, то следует найти предел
 ,
,
который может быть как равным
нулю, так и отличным от нуля.
Регулирование может
осуществляться и по второму интегралу от ошибки по времени:
 .
.
В этом случае имеет место
астатизм второго порядка. Ошибка, определяемая задающим воздействием, будет
равна нулю не только при ![]() , но и при
, но и при ![]() .
.
Повышение порядка
астатизма приводит к увеличению установившейся точности системы регулирования,
но снижает её быстродействие. Кроме того, усугубляется проблема устойчивости.
Изодромное регулирование.
Управляющее
воздействие:
 .
.
Изодромное
регулирование сочетает в себе точность интегрального регулирования с
быстродействием пропорционального регулирования. В первый момент работает
пропорциональное регулирование, с течением времени – интегральное.
Регулирование по производным.
Управляющее
воздействие:
 .
.
Самостоятельного
значения не имеет, так как в установившемся состоянии производная от ошибки
равна нулю. Тем не менее, может играть большую роль в динамике – повышается
быстродействие. Так, часто используется изодромное регулирование с добавлением
первой производной:
 .
.
Именно такой
способ регулирования применён в системе стабилизации радиального положения
пучка на протонном синхротроне ТРАПП (ИЯФ).
К системам автоматического регулирования (САР) предъявляются требования не только
устойчивости процессов регулирования. Для работоспособности системы не менее необходимо, чтобы процесс автоматического регулирования осуществлялся при обеспечении определенных показателей качества процесса управления.
Если исследуемая САР является устойчивой, возникает вопрос о том, насколько качественно происходит регулирование в этой системе и удовлетворяет ли оно технологическим требованиям обьекта управления.На практике качество регулирования определяется визуально по графику переходной характеристики. Однако, имеются точные но более сложные математические методы, дающие конкретные числовые значения (которые не рассматриваются в данной методике).
Классификация показателей качества состоит из нескольких групп:
- прямые — определяемые непосредственно по переходной характеристике процесса,
- корневые — определяемые по корням характеристического полинома,
- частотные — по частотным характеристикам,
- интегральные — получаемые путем интегрирования функций.
Прямыми показателями качества процесса управления, определяемые непосредственно по
переходной характеристике являются:
- Установившееся значение выходной величины Yуст,
- Степень затухания ?,
- Время достижения первого максимума tmax,
- Время регулирования tp,
- Ошибка регулирования Ест (статистическая или среднеквадратическая составляющие),
- Перерегулирование у,
- Динамический коэффициент регулирования Rd,
- Показатель колебательности М.
Например, переходная характеристика, снятая на объекте управления при отработке ступенчатого воздействия, имеет колебательный вид и представлена на рис.1.
Рисунок 1 — Определение показателей качества по переходной характеристике
Установившееся значение выходной величины Yуст
Установившееся значение выходной величины Yуст определяется по переходной характеристике,представленной на рис.1.
Степень затухания ?
Степень затухания ? определяется по формуле:
где А1 и А3 — соответственно 1-я и 3-я амплитуды переходной характеристики рис.1.
Время достижения первого максимума tmax
Время достижения первого максимума tmax определяется по переходной характеристике,представленной на рис.1.
Время регулирования tp
Время регулирования tp определяется согласно рис.1 следующим образом:Находится допустимое отклонение Д, например, задано Д = 5%Yуст и строится «зона» толщиной 2 Д(см. рис.1). Время tp соответствует последней точке пересечения Y(t) с данной границей. То есть время,когда колебания регулируемой величины перестают превышать 5 % от установившегося значения.
Настройки регулятора необходимо выбирать так, чтобы обеспечить минимально возможное значение общего времени регулирования, либо минимальное значение первой полуволны переходного процесса.
В непрерывных системах с типовыми регуляторами это время бывает минимальным при так называемых оптимальных апериодических переходных процессах. Дальнейшего уменьшения времени регулирования до абсолютного минимума можно достичь при использовании специальных оптимальных по быстродействию систем регулирования.
Ошибка регулирования Ест
Статическая ошибка регулирования Ест = Ув — Ууст, где Ув — входная величина (см. рис.1).В некоторых САР наблюдается ошибка, которая не исчезает даже по истечении длительногоинтервала времени — это статическая ошибка регулирования Ест. Данная ошибка не должна превышатьнекоторой наперед заданной величины. У регуляторов с интегральной составляющей ошибки в установившемся состоянии теоретическиравны нулю, но практически незначительные ошибки могут существовать из-за наличия зоннечувствительности в элементах системы.
Перерегулирование у
Величина перерегулирования у зависит от вида отрабатываемого сигнала.При отработке ступенчатого воздействия (по сигналу задания) – см. рис.1 величина перерегулирования у определяется по формуле:
где значения величин Ymax и Yуст определяются согласно рис.1.
При отработке возмущающего воздействия, величина перерегулирования у определяется изсоотношения:
где значения величин Xm и X1 определяются согласно рис. 2.
Рисунок 2 — График переходного процесса при отработке возмущения
Динамический коэффициент регулирования Rd
Динамический коэффициент регулирования Rd определяется из формулы:
где значения величин Y1 и Y0 определяются согласно рис. 3.
Рисунок 3 — К понятию динамического коэффициента регулирования
Величина динамического коэффициента Rd характеризует степень воздействия регулятора напроцесс, т.е. степень понижения динамического отклонения в системе с регулятором и без него.
Показатель колебательности М
Показатель колебательности M характеризует величину максимума модуля частотной передаточной функции замкнутой системы (на частоте резонанса) и, тем самым, характеризует колебательные свойства системы. Показатель колебательности наглядно иллюстрируется на рисунке 4.
Рисунок 4 — График модуля частотной передаточной функции замкнутой системы
Условно считается, что значение М=1,5-1,6 является оптимальным для промышленных САР, т.к. вэтом случае у обеспечивается в районе от 20% до 40%. При увеличении значения M колебательность всистеме возрастает.
В некоторых случаях нормируется полоса пропускания системы щп, которая соответствует уровню усиления в замкнутой системе 0,05. Чем больше полоса пропускания, тем больше быстродействие замкнутой системы. Однако при этом повышается чувствительность системы к шумам в канале измерения и возрастает дисперсия ошибки регулирования.
Лекция 17.
Расчет
установившейся ошибки в системах
управления. Структурные признаки
астатизма. Коэффициенты ошибок
Установившейся
(статической) ошибкой называют постоянное
значение сигнала ошибки x(t)=g(t)-y(t),
которое она приобретает по окончании
переходного процесса:
![]() ,
,
рисунок 116.

Очевидно,
установившаяся ошибка зависит от законов
изменения и численных характеристик
входных сигналов системы. Поэтому при
ее определении принято рассматривать
так называемые типовые входные сигналы,
законы изменения которых составляют
степенной ряд относительно времени.
Например, для задающего воздействия:
![]() ,
,
![]() ,
,
![]()
и так далее.
При наличии
нескольких воздействий на линейную
систему для определения xуст
используется принцип суперпозиции –
реакция линейной системы на совокупность
входных сигналов совпадает с алгебраической
суммой ее реакций на каждый из сигналов
в отдельности:
![]() ,
,
где каждое слагаемое,
или составляющая сигнала ошибки,
![]() определяется
определяется
для i-го
входного сигнала при условии, что
остальные тождественно равны нулю.
Такой подход полностью соответствует
определению передаточной функции и
позволяет выполнять расчет установившейся
ошибки на основе структурной схемы
системы.
Рассмотрим порядок
расчета установившейся ошибки на
следующем достаточно общем примере
(рисунок 117).
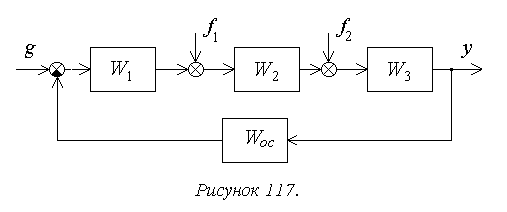
В соответствии с
принципом суперпозиции установившаяся
ошибка будет определяться здесь в виде
суммы трех составляющих
![]() .
.
Изображение по
Лапласу ошибки от задающего воздействия
получают через передаточную функцию
замкнутой системы по ошибке
![]()
при известном изображении задающего
воздействия G(s):
![]() ,
,
где (s)
– основная передаточная функция
замкнутой системы. Для структурной
схемы на рисунке 117
![]() ,
,
где
![]()
— передаточная функция разомкнутой
системы, или прямой цепи системы, для
рассматриваемого примера.
Непосредственно
для расчета установившегося значения
ошибки от задающего воздействия
используют теорему о конечном значении
для преобразования Лапласа:
![]()
В результате:
![]() .
.
Изображение по
Лапласу ошибки от возмущающего воздействия
получают через передаточную функцию
замкнутой системы по ошибке от возмущения
![]()
при известном изображении возмущающего
воздействия F(s):
![]() ,
,
где f(s)
–передаточная функция замкнутой системы
по возмущающему воздействию,
![]() ;
;
Wf(s)
– передаточная функция разомкнутой
системы по возмущению (передаточная
функция участка прямой цепи системы от
точки приложения возмущающего воздействия
до выхода системы).
Для структурной
схемы на рисунке 8 необходимо учитывать
два возмущающих воздействия, приложенные
в различные точки системы.
Для f1:
![]() ,
,
![]() ,
,
 .
.
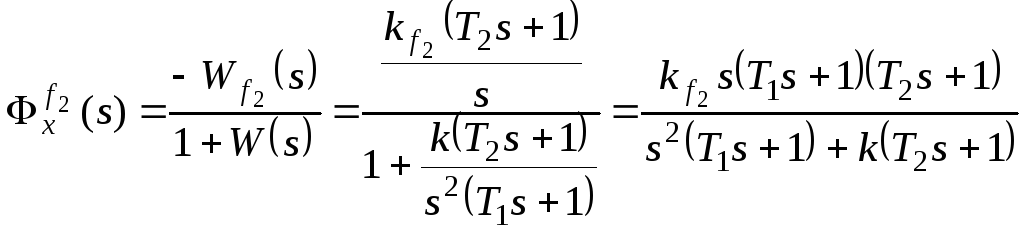
Для f2:
![]() ,
,
![]() ,
,
 .
.
Расчет упрощается
для системы с единичной отрицательной
обратной связью (рисунок 118):

 ,
,
 ,
,
где k=k1k2k3
– коэффициент передачи разомкнутой
системы.
Найдем установившуюся
ошибку для некоторых типовых вариантов
задающего воздействия.
При
![]()
получим:
![]()
 .
.
При
![]()
получим:
 .
.
При
![]()
получим:
 .
.
Если установившаяся
ошибка тождественно равна нулю при
каком-либо типовом варианте входного
сигнала, независимо от его численных
характеристик, систему называют
астатической по рассматриваемому
входному сигналу.
Количество типовых
вариантов входного сигнала – членов
степенного ряда, при которых установившаяся
ошибка тождественно равна нулю, определяет
порядок астатизма.
Рассматриваемая
система обладает свойством астатизма
второго порядка по задающему воздействию.
Рассмотрим
установившуюся ошибку от возмущения
f1:
![]() ,
,
 ,
,
где
![]()
– коэффициент передачи разомкнутой
системы по возмущению f1.
При
![]()
получим:
![]()
 .
.
При
![]()
получим:
 .
.
При
![]()
получим тот же результат.
Отметим, что по
возмущению f1
рассматриваемая система не является
астатической. Кроме того, она не в
состоянии отработать два последних
варианта входного сигнала.
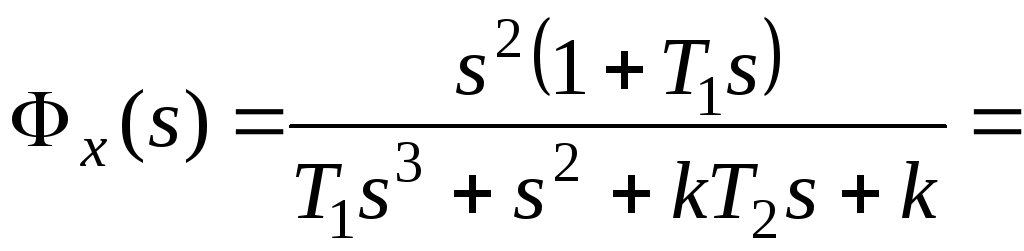
Рассмотрим
установившуюся ошибку от возмущения
f2:
![]() ,
,
 ,
,
где
![]()
– коэффициент передачи разомкнутой
системы по возмущению f2.
При
![]()
получим:
![]()
 .
.
При
![]()
получим:
 .
.
При
![]()
получим:
 .
.
По возмущению f2
рассматриваемая система имеет астатизм
первого порядка. Она не в состоянии
отработать возмущающее воздействие,
изменяющееся во времени с постоянным
ускорением.
Подведем некоторые
итоги:
1. Наличие и глубина
свойства астатизма зависят от точки
приложения входного сигнала.
2. Постоянные
времени звеньев системы не влияют на
ее точность.
3. Увеличение
значения коэффициента передачи
разомкнутой системы приводит к снижению
величины установившейся ошибки.
Для систем с
единичной отрицательной обратной связью
существуют достаточно простые структурные
признаки астатизма.
Рассмотрим
структуру, показанную на рисунке 119.

В общем случае
передаточная функция разомкнутой
системы может быть представлена в
следующей форме:
 ,
,
где l0.
Тогда получим:

и для общего вида
задающего воздействия
![]() ,
,
которому соответствует изображение
![]() ,
,
 .
.
Результат нахождения
этого предела зависит от соотношения
показателей степени:
— при l>v
установившаяся ошибка равна нулю
независимо от остальных параметров, то
есть имеет место астатизм;
— при l=v
получаем константу;
— при l<v
установившаяся ошибка стремится к
бесконечности, то есть система не в
состоянии отработать входной сигнал.
Учитывая, что
минимальное значение v
нулевое, получаем условие астатизма по
задающему воздействию: l>0.
Таким образом,
структурный признак астатизма по
задающему воздействию в системе с
единичной отрицательной обратной связью
состоит в наличии нулевых корней в
знаменателе передаточной функции
разомкнутой системы, или интегрирующих
звеньев в прямой цепи системы.
Нетрудно также
убедиться, что положительное значение
l
совпадает с порядком астатизма.
Для получения
признака астатизма по возмущающему
воздействию представим передаточные
функции на рисунке 10 в форме:
 ,
,
 ,
,
где l1+l2=l,
k1k2=k,
m1+m2=m,
n1+n2=n,
причем
![]()
и
![]() .
.
Тогда получим:


и для общего вида
возмущающего воздействия
![]() ,
,
которому соответствует изображение
![]() ,
,
 .
.
Все вышеприведенные
выводы можно повторить для показателя
степени l1.
Таким образом,
структурный признак астатизма по
возмущающему воздействию в системе с
единичной отрицательной обратной связью
состоит в наличии нулевых корней в
знаменателе передаточной функции
участка системы до точки приложения
воздействия, или интегрирующих звеньев
на том же участке.
Более общий подход
к оценке точности линейных систем
управления основан на получении и
использовании коэффициентов ошибок.
Рассмотрим его на примере анализа
реакции системы на задающее воздействие.
Если рассматривать
произвольный закон изменения задающего
воздействия g(t),
то эта функция времени может быть
разложена в степенной ряд относительно
аргумента t.
Члены степенного ряда, как известно,
находятся через производные
![]() ,
,
![]() ,
,
…,
![]() ,
,
…
В общем случае ряд
бесконечен. Поэтому с практической
точки зрения рассматривать такое
представление сигнала целесообразно
только при достаточно плавном его
изменении, когда можно ограничиться
конечным числом членов ряда, имея в
виду, что при n
большем некоторого m
можно принять
![]() ,
,
n>m.
Для задачи оценки
установившейся ошибки при
![]()
с формулированное допущение вполне
корректно, так как в противном случае
эта задача не имеет смысла.
Коэффициенты
ошибки получают разложением передаточной
функции замкнутой системы по ошибке в
степенной ряд (ряд Тейлора) относительно
аргумента s:
![]() ,
,
где коэффициенты
разложения в общем случае находят как
значения производных в точке s=0:
 .
.
Передаточные
функции, представляющие собой отношения
полиномов, при достаточно высоком
порядке системы могут оказаться слишком
сложными для дифференцирования. Поэтому
на практике коэффициенты их разложения
в ряд чаще находят путем деления полиномов
– числителя на знаменатель.
С учетом разложения
передаточной функции в ряд можно записать
изображение по Лапласу сигнала ошибки
в следующей форме:
![]() .
.
Отметим, что с
учетом сформулированного выше допущения
такое представление сигнала ошибки
соответствует
![]()
или
![]() .
.
Перейдя к оригиналу
с учетом теоремы дифференцирования
получим:
![]() .
.
Вернемся к
рассмотренному выше примеру и предположим,
что задающее воздействие изменяется
по произвольному закону, но при достаточно
больших значениях времени этот закон
аппроксимируется выражением
![]() .
.
Найдем коэффициенты
разложения передаточной функции по
ошибке

в степенной ряд.
Здесь сразу можно
отметить, что номер первого ненулевого
члена ряда определяется низшей степенью
аргумента s
в числителе дроби, то есть первые два
коэффициента c0
и c1
здесь получаем тождественно равными
нулю.
Далее получим:





В результате
получаем
![]() ,
,
![]() ,
,
![]() ,
,
![]()
и так далее.
Найдем производные
задающего воздействия:
![]() ,
,
![]() ,
,
![]() .
.
Ясно, что для
определения установившейся ошибки
достаточно первых трех коэффициентов:
![]() .
.
В заключение
отметим, что порядок астатизма системы
по какому-либо входному сигналу совпадает
с количеством нулевых коэффициентов
ошибки, получаемых в разложении в ряд
передаточной функции по ошибке от
данного входного сигнала.
Соседние файлы в папке Конспект ТАУ
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Макеты страниц
где коэффициенты  принято называть коэффициентами ошибок. Формула (4.3) получена следующим образом.
принято называть коэффициентами ошибок. Формула (4.3) получена следующим образом.
Передаточная функция замкнутой системы относительно ошибки (рис. 4.1)

Из (4.4) можно найти выражение для изображения ошибки:

Разложим передаточную функцию по ошибке  в ряд по возрастающим степеням s в окрестности точки
в ряд по возрастающим степеням s в окрестности точки  что соответствует большим значениям времени
что соответствует большим значениям времени  т. е. значению установившейся ошибки при заданном управляющем воздействии.
т. е. значению установившейся ошибки при заданном управляющем воздействии.
В соответствии с (4.5) можно записать

Если передаточная функция  является дробно-рациональной функцией
является дробно-рациональной функцией

то разложение в ряд  можно осуществить делением числителя на знаменатель, располагая члены полинома в порядке возрастания степеней. Переходя в (4.6) от изображений к оригиналам, можно получить для
можно осуществить делением числителя на знаменатель, располагая члены полинома в порядке возрастания степеней. Переходя в (4.6) от изображений к оригиналам, можно получить для  выражение (4.3).
выражение (4.3).
Коэффициенты ошибок  определяют по формулам разложения функции
определяют по формулам разложения функции  в ряд Тейлора:
в ряд Тейлора:

Если  то все производные
то все производные  тогда
тогда

В данном случае  — значение установившейся ошибки в замкнутой системе.
— значение установившейся ошибки в замкнутой системе.
Если  ; коэффициенты
; коэффициенты  и т. д.
и т. д.
Коэффициент  называют коэффициентом статической или позиционной ошибки; коэффициент С — коэффициентом скоростной ошибки,
называют коэффициентом статической или позиционной ошибки; коэффициент С — коэффициентом скоростной ошибки,  — коэффициентом ошибки от ускорения.
— коэффициентом ошибки от ускорения.
В статических системах коэффициент  отличен от нуля. В системах с астатизмом первого порядка
отличен от нуля. В системах с астатизмом первого порядка  . В системах с астатизмом второго порядка
. В системах с астатизмом второго порядка  . Увеличение числа интегрирующих звеньев приводит к повышению порядка астатизма системы, т. е. к нулевым значениям нескольких коэффициентов ошибок, но при этом усложняется обеспечение устойчивости системы. Если на систему помимо задающего воздействия
. Увеличение числа интегрирующих звеньев приводит к повышению порядка астатизма системы, т. е. к нулевым значениям нескольких коэффициентов ошибок, но при этом усложняется обеспечение устойчивости системы. Если на систему помимо задающего воздействия  действует и возмущение
действует и возмущение  (рис. 4.2), то астатизм системы относительно
(рис. 4.2), то астатизм системы относительно  зависит от места включения интегрирующего звена.
зависит от места включения интегрирующего звена.
Пусть воздействия на САУ являются постоянными величинами и равны  Рассмотрим несколько случаев.
Рассмотрим несколько случаев.
1. В системе отсутствуют интегрирующие звенья. Элементы 1 и 2 системы (рис. 4.2) являются инерционными звеньями и соответственно равны


Рис. 4.2
Тогда на основании метода суперпозиции установившаяся ошибка САУ

где  — ошибка отработки системой задающего воздействия:
— ошибка отработки системой задающего воздействия:

а  — ошибка, вызванная действием помехи:
— ошибка, вызванная действием помехи:

В данном случае САУ является статической относительно обоих воздействий, так как  .
.
2. Допустим, что в элемент 2 рассматриваемой системы (рис. 4.2) включено интегрирующее звено, а элемент  является инерционным звеном, как и в случае 1. При этом передаточная функция элемента 2
является инерционным звеном, как и в случае 1. При этом передаточная функция элемента 2

Тогда составляющие  ошибки системы (4.9)
ошибки системы (4.9)

Следовательно, САУ является астатической относительно задающего воздействия  и статической относительно возмущения
и статической относительно возмущения 
3. Пусть интегрирующее звено включено в элемент  передаточная функция его при этом равна
передаточная функция его при этом равна

Второе звено является инерционным звеном, а передаточная функция его та же, что и в случае 1.
Рассчитаем составляющие ошибки 

Поскольку и  система является астатической и относительно воздействия
система является астатической и относительно воздействия  и относительно возмущения
и относительно возмущения 
Нужно отметить, что метод коэффициентов ошибок применяется при сравнительно медленно меняющихся воздействиях.
Пример 4.1. Для системы (рис. 4.1) определить значение устано вившейся ошибки системы. Передаточная функция системы в разомкнутом состоянии

где 
Выходной сигнал меняется по закону  Найдем передаточную функцию замкнутой системы относительно ошибки:
Найдем передаточную функцию замкнутой системы относительно ошибки:

Коэффициенты ошибок  так как система астатическая) определяют по (4.7) или разложением в ряд по возрастающим степеням s функции
так как система астатическая) определяют по (4.7) или разложением в ряд по возрастающим степеням s функции  делением числителя на знаменатель:
делением числителя на знаменатель:

Коэффициенты  вычислять не имеет смысла, так как функция
вычислять не имеет смысла, так как функция  имеет только две производные, не равные нулю.
имеет только две производные, не равные нулю.
Определим первую и вторую производные входного воздействия

Тогда 
The deviation of the output of control system from desired response during steady state is known as steady state error. It is represented as $e_{ss}$. We can find steady state error using the final value theorem as follows.
$$e_{ss}=lim_{t to infty}e(t)=lim_{s to 0}sE(s)$$
Where,
E(s) is the Laplace transform of the error signal, $e(t)$
Let us discuss how to find steady state errors for unity feedback and non-unity feedback control systems one by one.
Steady State Errors for Unity Feedback Systems
Consider the following block diagram of closed loop control system, which is having unity negative feedback.
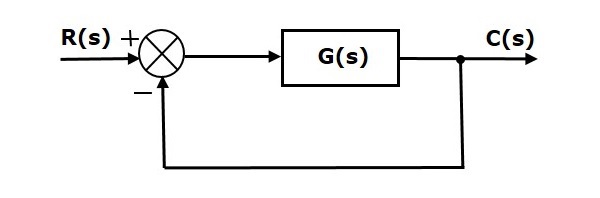
Where,
- R(s) is the Laplace transform of the reference Input signal $r(t)$
- C(s) is the Laplace transform of the output signal $c(t)$
We know the transfer function of the unity negative feedback closed loop control system as
$$frac{C(s)}{R(s)}=frac{G(s)}{1+G(s)}$$
$$Rightarrow C(s)=frac{R(s)G(s)}{1+G(s)}$$
The output of the summing point is —
$$E(s)=R(s)-C(s)$$
Substitute $C(s)$ value in the above equation.
$$E(s)=R(s)-frac{R(s)G(s)}{1+G(s)}$$
$$Rightarrow E(s)=frac{R(s)+R(s)G(s)-R(s)G(s)}{1+G(s)}$$
$$Rightarrow E(s)=frac{R(s)}{1+G(s)}$$
Substitute $E(s)$ value in the steady state error formula
$$e_{ss}=lim_{s to 0} frac{sR(s)}{1+G(s)}$$
The following table shows the steady state errors and the error constants for standard input signals like unit step, unit ramp & unit parabolic signals.
| Input signal | Steady state error $e_{ss}$ | Error constant |
|---|---|---|
|
unit step signal |
$frac{1}{1+k_p}$ |
$K_p=lim_{s to 0}G(s)$ |
|
unit ramp signal |
$frac{1}{K_v}$ |
$K_v=lim_{s to 0}sG(s)$ |
|
unit parabolic signal |
$frac{1}{K_a}$ |
$K_a=lim_{s to 0}s^2G(s)$ |
Where, $K_p$, $K_v$ and $K_a$ are position error constant, velocity error constant and acceleration error constant respectively.
Note − If any of the above input signals has the amplitude other than unity, then multiply corresponding steady state error with that amplitude.
Note − We can’t define the steady state error for the unit impulse signal because, it exists only at origin. So, we can’t compare the impulse response with the unit impulse input as t denotes infinity.
Example
Let us find the steady state error for an input signal $r(t)=left( 5+2t+frac{t^2}{2} right )u(t)$ of unity negative
feedback control system with $G(s)=frac{5(s+4)}{s^2(s+1)(s+20)}$
The given input signal is a combination of three signals step, ramp and parabolic. The following table shows the error constants and steady state error values for these three signals.
| Input signal | Error constant | Steady state error |
|---|---|---|
|
$r_1(t)=5u(t)$ |
$K_p=lim_{s to 0}G(s)=infty$ |
$e_{ss1}=frac{5}{1+k_p}=0$ |
|
$r_2(t)=2tu(t)$ |
$K_v=lim_{s to 0}sG(s)=infty$ |
$e_{ss2}=frac{2}{K_v}=0$ |
|
$r_3(t)=frac{t^2}{2}u(t)$ |
$K_a=lim_{s to 0}s^2G(s)=1$ |
$e_{ss3}=frac{1}{k_a}=1$ |
We will get the overall steady state error, by adding the above three steady state errors.
$$e_{ss}=e_{ss1}+e_{ss2}+e_{ss3}$$
$$Rightarrow e_{ss}=0+0+1=1$$
Therefore, we got the steady state error $e_{ss}$ as 1 for this example.
Steady State Errors for Non-Unity Feedback Systems
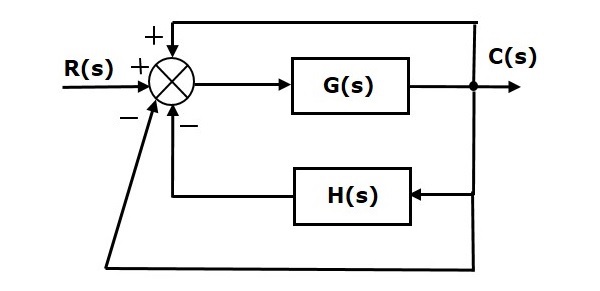
Consider the following block diagram of closed loop control system, which is having nonunity negative feedback.
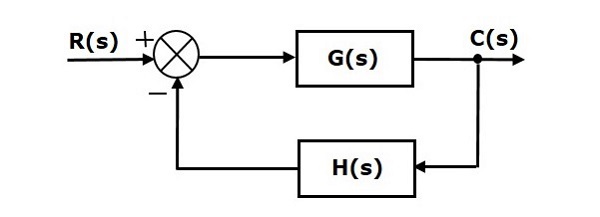
We can find the steady state errors only for the unity feedback systems. So, we have to convert the non-unity feedback system into unity feedback system. For this, include one unity positive feedback path and one unity negative feedback path in the above block diagram. The new block diagram looks like as shown below.
Simplify the above block diagram by keeping the unity negative feedback as it is. The following is the simplified block diagram.
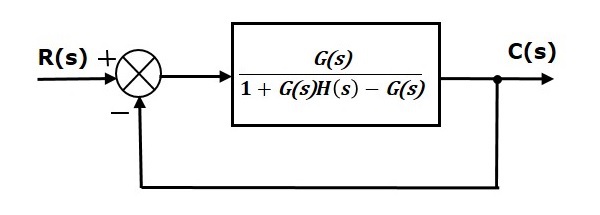
This block diagram resembles the block diagram of the unity negative feedback closed loop control system. Here, the single block is having the transfer function $frac{G(s)}{1+G(s)H(s)-G(s)}$ instead of $G(s)$. You can now calculate the steady state errors by using steady state error formula given for the unity negative feedback systems.
Note − It is meaningless to find the steady state errors for unstable closed loop systems. So, we have to calculate the steady state errors only for closed loop stable systems. This means we need to check whether the control system is stable or not before finding the steady state errors. In the next chapter, we will discuss the concepts-related stability.
The deviation of the output of control system from desired response during steady state is known as steady state error. It is represented as $e_{ss}$. We can find steady state error using the final value theorem as follows.
$$e_{ss}=lim_{t to infty}e(t)=lim_{s to 0}sE(s)$$
Where,
E(s) is the Laplace transform of the error signal, $e(t)$
Let us discuss how to find steady state errors for unity feedback and non-unity feedback control systems one by one.
Steady State Errors for Unity Feedback Systems
Consider the following block diagram of closed loop control system, which is having unity negative feedback.
Where,
- R(s) is the Laplace transform of the reference Input signal $r(t)$
- C(s) is the Laplace transform of the output signal $c(t)$
We know the transfer function of the unity negative feedback closed loop control system as
$$frac{C(s)}{R(s)}=frac{G(s)}{1+G(s)}$$
$$Rightarrow C(s)=frac{R(s)G(s)}{1+G(s)}$$
The output of the summing point is —
$$E(s)=R(s)-C(s)$$
Substitute $C(s)$ value in the above equation.
$$E(s)=R(s)-frac{R(s)G(s)}{1+G(s)}$$
$$Rightarrow E(s)=frac{R(s)+R(s)G(s)-R(s)G(s)}{1+G(s)}$$
$$Rightarrow E(s)=frac{R(s)}{1+G(s)}$$
Substitute $E(s)$ value in the steady state error formula
$$e_{ss}=lim_{s to 0} frac{sR(s)}{1+G(s)}$$
The following table shows the steady state errors and the error constants for standard input signals like unit step, unit ramp & unit parabolic signals.
| Input signal | Steady state error $e_{ss}$ | Error constant |
|---|---|---|
|
unit step signal |
$frac{1}{1+k_p}$ |
$K_p=lim_{s to 0}G(s)$ |
|
unit ramp signal |
$frac{1}{K_v}$ |
$K_v=lim_{s to 0}sG(s)$ |
|
unit parabolic signal |
$frac{1}{K_a}$ |
$K_a=lim_{s to 0}s^2G(s)$ |
Where, $K_p$, $K_v$ and $K_a$ are position error constant, velocity error constant and acceleration error constant respectively.
Note − If any of the above input signals has the amplitude other than unity, then multiply corresponding steady state error with that amplitude.
Note − We can’t define the steady state error for the unit impulse signal because, it exists only at origin. So, we can’t compare the impulse response with the unit impulse input as t denotes infinity.
Example
Let us find the steady state error for an input signal $r(t)=left( 5+2t+frac{t^2}{2} right )u(t)$ of unity negative
feedback control system with $G(s)=frac{5(s+4)}{s^2(s+1)(s+20)}$
The given input signal is a combination of three signals step, ramp and parabolic. The following table shows the error constants and steady state error values for these three signals.
| Input signal | Error constant | Steady state error |
|---|---|---|
|
$r_1(t)=5u(t)$ |
$K_p=lim_{s to 0}G(s)=infty$ |
$e_{ss1}=frac{5}{1+k_p}=0$ |
|
$r_2(t)=2tu(t)$ |
$K_v=lim_{s to 0}sG(s)=infty$ |
$e_{ss2}=frac{2}{K_v}=0$ |
|
$r_3(t)=frac{t^2}{2}u(t)$ |
$K_a=lim_{s to 0}s^2G(s)=1$ |
$e_{ss3}=frac{1}{k_a}=1$ |
We will get the overall steady state error, by adding the above three steady state errors.
$$e_{ss}=e_{ss1}+e_{ss2}+e_{ss3}$$
$$Rightarrow e_{ss}=0+0+1=1$$
Therefore, we got the steady state error $e_{ss}$ as 1 for this example.
Steady State Errors for Non-Unity Feedback Systems
Consider the following block diagram of closed loop control system, which is having nonunity negative feedback.
We can find the steady state errors only for the unity feedback systems. So, we have to convert the non-unity feedback system into unity feedback system. For this, include one unity positive feedback path and one unity negative feedback path in the above block diagram. The new block diagram looks like as shown below.
Simplify the above block diagram by keeping the unity negative feedback as it is. The following is the simplified block diagram.
This block diagram resembles the block diagram of the unity negative feedback closed loop control system. Here, the single block is having the transfer function $frac{G(s)}{1+G(s)H(s)-G(s)}$ instead of $G(s)$. You can now calculate the steady state errors by using steady state error formula given for the unity negative feedback systems.
Note − It is meaningless to find the steady state errors for unstable closed loop systems. So, we have to calculate the steady state errors only for closed loop stable systems. This means we need to check whether the control system is stable or not before finding the steady state errors. In the next chapter, we will discuss the concepts-related stability.